In this article we connect an Ultrasonic ranging module to a raspberry Pi Pico
Features
Ultrasonic ranging module HC – SR04 provides 2 cm – 400 cm non-contact measurement function, the ranging accuracy can reach to 3 mm. The modules includes ultrasonic transmitters, receiver and control circuit.
The basic principle of work:
(1) Using IO trigger for at least 10 us high level signal,
(2) The Module automatically sends eight 40 kHz and detect whether there is a pulse signal back.
(3) If the signal back, through high level , time of high output IO duration is the time from sending ultrasonic to returning.
Test distance = (high level time×velocity of sound (340M/S) / 2,
Electric Parameters
Working Voltage – DC 5 V
Working Current – 15mA
Working Frequency – 40 Hz
Max Range – 4 metres
Min Range – 2 centimetres
Measuring Angle – 15 degrees
Trigger Input Signal – 10uS TTL pulse
Echo Output Signal – Input TTL lever signal and the range in proportion
Dimension – 45*20*15 mm
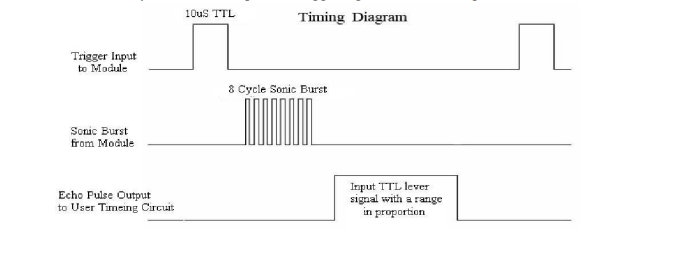
Timing diagram
The Timing diagram is shown below. You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo.
The Echo is a distance object that is pulse width and the range in proportion .
You can calculate the range through the time interval between sending trigger signal and receiving echo signal.
Formula: uS / 58 = centimeters or uS / 148 =inch; or: the range = high level time * velocity (340M/S) / 2; we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal.
Parts Required
| Name | Link |
| Pico | Raspberry Pi Pico Development Board |
| HC-SR04 | |
| Connecting cables | Aliexpress product link |
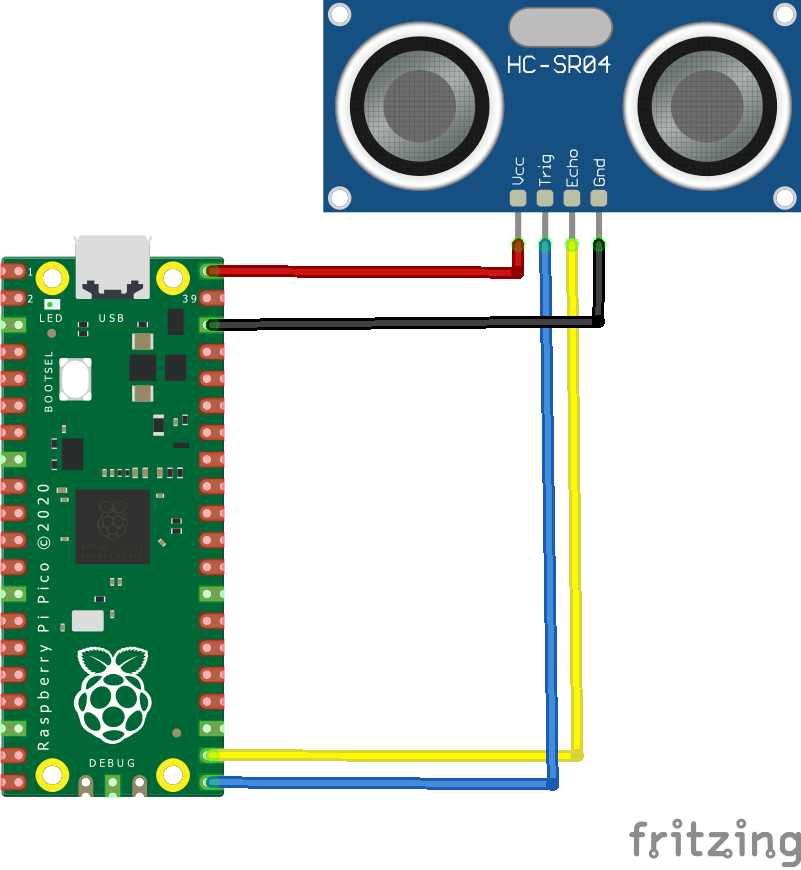
Schematic/Connection
To connect the display to your Raspberry PI Pico requires just 4 wires, you just need to wire the Vcc and GND PINs from display to VBuS and a GND PINs of RPI Pico, then Echo and Trig PINs from the module to suitable SDA and SCL PINs from Raspberry PI Pico
Here is a layout in fritzing to show this
Code Example
I use thonny for all development
# The distance is captured by a Sharpir sensor and displayed on the screen
# Insert HC-SR04 to CN6
import utime
import os
from machine import Pin
trigger = Pin(16, Pin.OUT)
echo = Pin(17, Pin.IN)
# creates a function
while True:
print("start")
# turns off trigger, then waits 2 microseconds
trigger.low()
utime.sleep_us(2)
# turns on trigger for 5 microseconds
trigger.high()
utime.sleep_us(5)
trigger.low()
# creates a loop that checks the echo pin - if nothing is received, updates a variable called signaloff
while echo.value() == 0:
signaloff = utime.ticks_us()
# creates another loop that checks echo pin - if something is received, updates a variable called signalon
while echo.value() == 1:
signalon = utime.ticks_us()
# creates a variable called timepassed which stores the value of the time for the pulse to return as an echo
timepassed = signalon - signaloff
# creates a variable called distance to store value of timepassed as a distance in centimetres
distance = (timepassed * 0.0343) / 2
# prints distance in console
print("The distance from object is ", distance, "cm")
utime.sleep_ms(2000)
In the repl window I saw this is
The distance from object is 35.96355 cm start The distance from object is 23.78705 cm start The distance from object is 25.57065 cm start The distance from object is 15.5379 cm start The distance from object is 15.79515 cm start The distance from object is 11.85065 cm start The distance from object is 5.64235 cm