In this article we connect a ICM-20948 9-axis MotionTracking device to a Raspberry Pi Pico running Circuitpython
Sensor Information
The ICM-20948 is the world’s lowest power 9-axis Motion Tracking device that is ideally suited for Smartphones, Tablets, Wearable Sensors, and IoT applications.
- 1/3 the power of existing 9-axis devices
- 3-axis gyroscope, 3-axis accelerometer, 3-axis compass, and a Digital Motion Processor™ (DMPTM) in a 3x3x1mm (24-pin QFN) package
- DMP offloads computation of motion processing algorithms from the host processor, improving system power performance
- Software drivers are fully compliant with Google’s latest Android release
- EIS FSYNC support
ICM-20948 supports an auxiliary I2C interface to external sensors, on-chip 16-bit ADCs, programmable digital filters, an embedded temperature sensor, and programmable interrupts. The device features an operating voltage range down to 1.71V. Communication ports include I 2C and high speed SPI at 7MHz.
Features
• Lowest Power 9-Axis Device at 2.5 mW
• 3-Axis Gyroscope with Programmable FSR of ±250 dps, ±500 dps, ±1000 dps, and ±2000 dps
• 3-Axis Accelerometer with Programmable FSR of ±2g, ±4g, ±8g, and ±16g
• 3-Axis Compass with a wide range to ±4900 µT
• Onboard Digital Motion Processor (DMP)
• Android support
• Auxiliary I2C interface for external sensors
• On-Chip 16-bit ADCs and Programmable Filters
• 7 MHz SPI or 400 kHz Fast Mode I²C
• Digital-output temperature sensor
• VDD operating range of 1.71V to 3.6V
Parts Required
| Name | Link |
| Pico | Raspberry Pi Pico Development Board |
| ICM20948 | ICM-20948 Sensor Module Low Power 9 Axis MEMS Motion Tracking Device Sensor |
| Connecting cables | Aliexpress link |
Schematic/Connection
Black for GND
Red for V+
Blue for SDA
Yellow for SCL
So color coded for ease of use, this layout shows a connection to the module
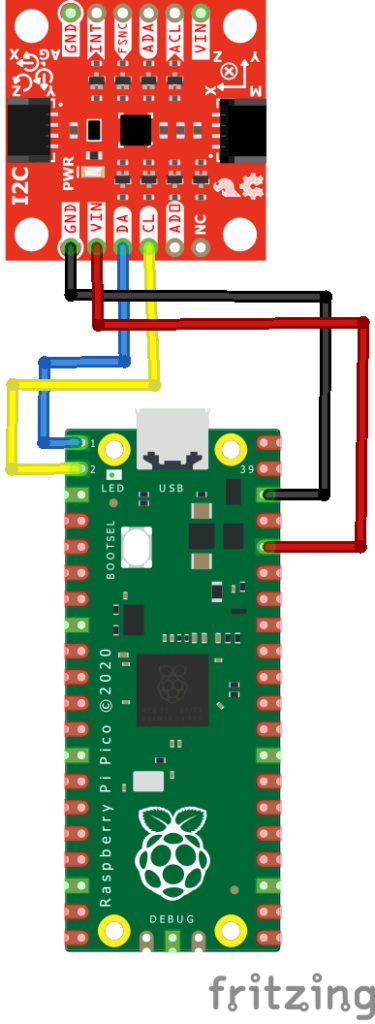
rp2040 and ICM20948
Code Example
I used Thonny for development
The following is based on a library , I copied the adafruit_icm20x.mpy library for this device to the lib folder on my Raspberry Pi Pico – https://circuitpython.org/libraries
[codesyntax lang=”python”]
import time
import board
import busio
import adafruit_icm20x
# Create sensor object, using the board's default I2C bus.
i2c = busio.I2C(board.GP1, board.GP0) # SCL, SDA
icm = adafruit_icm20x.ICM20948(i2c,0x68)
while True:
print("Acceleration: X:%.2f, Y: %.2f, Z: %.2f m/s^2" % (icm.acceleration))
print("Gyro X:%.2f, Y: %.2f, Z: %.2f rads/s" % (icm.gyro))
print("Magnetometer X:%.2f, Y: %.2f, Z: %.2f uT" % (icm.magnetic))
print("")
time.sleep(0.5)
[/codesyntax]
Output
Here is what I saw in Thonny REPL window
Acceleration: X:-2.78, Y: -9.25, Z: 2.60 m/s^2
Gyro X:-0.03, Y: 0.00, Z: -0.01 rads/s
Magnetometer X:-23.55, Y: -56.40, Z: 27.00 uT
Acceleration: X:-2.77, Y: -9.26, Z: 2.67 m/s^2
Gyro X:-0.03, Y: 0.01, Z: 0.00 rads/s
Magnetometer X:-25.35, Y: -57.15, Z: 27.75 uT
Acceleration: X:-2.79, Y: -9.21, Z: 2.61 m/s^2
Gyro X:-0.03, Y: -0.00, Z: -0.01 rads/s
Magnetometer X:-23.10, Y: -57.75, Z: 27.60 uT
Links
https://invensense.tdk.com/wp-content/uploads/2016/06/DS-000189-ICM-20948-v1.3.pdf